
Просмотры:0 Автор:Pедактор сайта Время публикации: 2021-09-14 Происхождение:Работает








введение
Океан является не только важным сокровищем рыболовных и минеральных ресурсов, но и важной позицией для стран по поддержанию национальной безопасности и военной борьбы. Таким образом, подводная акустическая технология стала важным средством для текущего разведки и разработки морских ресурсов, подводной связи и навигации судов, обнаружения и распознавания подводных целей, а также мониторинга морской экологии и прогнозирования стихийных бедствий. Аподводной акустический датчикявляется носителем излучения и приема звуковой волны в подводной акустической технологии, и ее технический уровень напрямую влияет или даже определяет эффект окончательного реализации подводной акустической технологии. Обнаружение активного сонара и исследование морских ресурсов требуют преобразователей с низкой частотой, высокой мощностью и небольшим размером. Моделирование шума и калибровка сонара требуют подводных акустических преобразователей с ультра-низкой частотой и характеристиками сверхширной полосы. В области подводной акустической связи подводные акустические преобразователи должны иметь характеристики высокой эффективности, ультра широкополосной, высокой чувствительности и ровной в диапазоне. В целом, подводные акустические преобразователи развиваются в направлении низкой частоты, широкополосной, высокой мощности, небольшого размера и глубокой воды. Глубокооборный преобразователь принимает метод внутреннего промывки для работы на глубине до 11 000 м, и использует связь внутренней полости масла и структурных частей для формирования многомодовой вибрации, которая расширяет полосу частоты датчика. Многорезонансная полость образуется путем переполнения круглых трубок разных размеров, и рабочая частота может быть скорректирована путем изменения размера круглых трубок, чтобы получить более широкий преобразователь.
Пропускная способность частотного диапазона составляет 200 Гц ~ 2 кГц. ДиаметрПодводной гидрофон датчиксоставляет 250 мм, а длина - 500 мм. Полоса покрытия составляет 7 ~ 15 кГц, уровень источника звука составляет 200 дБ, чувствительность получения -176 дБ, а рабочая подводная глубина составляет 11000 м. Недавно разработанный преобразователь имеет размер диаметра 240 мм, длина составляет 420 мм, полоса частоты покрытия составляет 1,8~8,0 кГц, реакция на передачу составляет 144 дБ, а колебания в полосе меньше 6 дБ. Таким образом, зарубежные подводные акустические преобразователи охватывали всю полосу рабочей частоты, даже охватывая всю область воды, и сформировали определенную масштаб в инженерии, сериализации и обобщении, представляя продвинутый уровень отрасли. Внутренние исследовательские институты и другие связанные подразделения провели много исследований и экспериментов и достигли определенных результатов. Тем не менее, в ключевой технологии и технологии обработки подводных акустических преобразователей по-прежнему существует определенный пробел по сравнению с зарубежными странами, особенно в условиях постоянно растущих требований для ультра широкополосного, небольшого размера и высокой производительности при подводном акустическом обнаружении требуется углубленное исследовательская работа. Требования к разработке. С разработкой технологии шумоподавления судов в различных странах уровень шума и подводных целей постепенно снижался. Подводное оружие и оборудование, такое как торпеды, в основном используют широкополосные подводные акустические преобразователи для расширения диапазона обнаружения и улучшения сложной подводной акустики. Способность обнаружения и точность попадания на фоне реверберации повышают способность распознавания подводной цели. Кроме того, в ответ на различные военно-морские силы, разведывательные агентства, экономические организации и даже международные террористические организации, в развертывании лягушек, автономных подводных транспортных средств (AUV) и микро-размножений для разведки, саботажа, взрывов и операций на мине часто выполняются в мелких операциях. Удаленно контролируемые беспилотные погружения (ROV) и другие подводные транспортные средства оснащены различным оборудованием для обнаружения для защиты, а конкретные требования выдвигаются для основных технических показателей их сонара. В этой статье, стремящейся к требованиям акустического обнаружения пузырьков следы поверхностных кораблей, модель разработана и разработана с 3~100 кГц ультра широкополосные функции принимают и передают функции, которые могут провести подводное акустическое измерение в реальном времени пузырьков пробуждения кораблей под большим углом открытия, и требует, чтобы функции получения и отправки не зависели друг от друга. И контролируемая, общая структура должна быть компактной, физический размер невелик, и ее легко установить и использовать на небольшом ПЗУ. Принимая во внимание фактические требования и фактические условия труда, основные технические индикаторы преобразователя, описанные в этой статье, заключаются в следующем: 1) Частота передачи составляет 3 ~ 100 кГц, а частота принимающей - 1 ~ 100 кГц. 2) Уровень источника звука эмиссии≥189db. 3) Получение чувствительности≥-180db. 4) В флуктуации в полосе колебания≤6db. 5) Ширина луча (горизонтальная)≥90°(-3db). 6) Ширина луча (вертикальная)≥70°(-3db). 7) Рабочая глубина воды≥500 м. 8) Размеры≤350 мм×150 мм×250 мм. 9) Месса≤10 кг. Среди них ROV является небольшой структурой обнаружения, и его пропускная способность ограничена, поэтому датчик должен быть максимально небольшим, световым весом и простым в реализации в соответствии с индикаторами производительности встречи.
2 Конструкция и разработка преобразователя
2.1 Проектирование и анализ симуляции преобразователей
АПодводной цилиндрический преобразовательпринадлежит отдельной структуре получения и передачи. Передача реализуется с использованием трех составных транс -датчиков, передавающих структуру стержня, а соответствующие полосы частот 3 - 3~18 кГц, 18~45 кГц, 45~100 кГц; Приемный конец реализуется с использованием 2 гидрофонов серии серии керамических кольцов керамического кольца, а полосы частот соответственно составляют 1-40 кГц, 40-100 кГц. Вышеупомянутая передача и приемная база преобразователей упакована в целом, а внутри-акустическая перегородка разработана. После интеграции пакета общая масса составляет около 9 кг. Общая форма преобразователя является нерегулярным кубоидом. Основной размер составляет около 310 мм×150 мм×220 мм. Внешний вид показан на рисунке 1. Основной кабель может быть подключен к внешнему электронному оборудованию в виде разъемов.

Цель основных требований технического индекса подводного акустического преобразователя в этой статье в сочетании с вышеуказанной схемой проектирования, анализ моделирования его передачи и получения производительности осуществляется. Из -за сложной структуры преобразователя, разработанного в этой статье и широко -частотного охвата полосы частот, теоретические методы анализа не подходят для расчета и моделирования. Как мы все знаем, метод конечных элементов представляет собой метод численного моделирования, широко используемый в текущей инженерной практике. Используйте программное обеспечение ANSYS для моделирования области воды в свободном поле и установить упрощенную модель преобразователя. Выберите точку в блоке дальнего поля непосредственно перед передней крышкой, чтобы вычислить звуковое давление, а затем может быть преобразована отклик напряжения передачи датчика. В дальнем поле выберите звуковое давление в каждом направлении на определенном расстоянии вдоль центра преобразователя, чтобы вычислить угол открытого угла направления эмиссии преобразователя. Поскольку композитный стержень имеет осевую симметрию, 2D -осесимметричный преобразователь -модель конечных элементов выбирается для анализа конечных элементов. При использовании расчета ANSYS необходимо рассмотреть влияние воды на преобразователь. Обычно эквивалентным эффектом является водное поло, а затем нагрузка применяется для расчета решения. Модель преобразователя в воде показана на рисунках 2 и 3.

На рисунках 2 и 3 видно, что передача передачи разработана с широкополосной докладкой с двойным резонансным пиком. Резонансные частоты единицы 3 ~ 18 кГц передаваемого преобразователя составляют 5 кГц, 14 кГц, а резонансные частоты единицы 18 ~ 45 кГц составляют 20 кГц, 40 кГц, а резонансные частоты 45 ~ 100 кГц, 55 тыс. Блок 1-40 кГц принимающего гидрофона использует пьезоэлектрическое кольцо, а резонансная частота с одним кольцом превышает 40 кГц, чтобы обеспечить плоскую полосу рабочей частоты. Внутренняя двух серия и двухпараллельная структура улучшает чувствительность и стабильность; Блок 40-100 кГц принимающего гидрофона использует пьезоэлектрический композитный материал, резонансная частота превышает 100 кГц, чтобы обеспечить плоскостность в полосе. В этой статье уравнение конечного элемента используется в качестве MU¨+ Cu·+Ku = f (1) где: m - матрица массовой массы; C - матрица демпфирования; K - матрица жесткости; U - вектор узлового смещения; F - вектор нагрузки. Уровень отклика напряжения эмиссии TVR IS TVR = 20LG P R V + 120 (2) Где: P - звуковое давление узла; R - расстояние от узла до эквивалентного центра источника звука; V - приложенное напряжение. Извлеките звуковое давление p узла на акустической оси в ANSYS и вычислите кривую отклика эмиссии преобразователя. В фактической конструкции передающая часть подводного акустического преобразователя состоит из трех видов композитных стержня, передавающих датчики, что реализует широкополосную направленную излучение и одновременно подавляет заднее излучение. Передачающий преобразователь охватывает широкий диапазон частот и в основном используется для подводного акустического измерения. Он должен иметь хорошую плоскостность в диапазоне, чтобы обеспечить точность подводного акустического измерения. В инженерии такие методы, как оптимизация размера излучающей головки преобразователя или контроль фазовой оптимизации, чтобы уменьшить колебания в полосе, и последовательное сопротивление на пьезоэлектрическом керамическом стеке до и после двойного восстановления (или \" Двойное возбуждение \") часто используется датчик эмиссии. , Чтобы еще больше уменьшить колебание отклика транс -датчика в полосе рабочей частоты. В этой статье учитывается размер и качество преобразователя, установленного на небольшом ПЗУ, а также общую структуру установки, и в основном принимает метод литературы для подавления колебаний внедрения передаваемого преобразователя, то есть метод адаптации Сопротивление соответствующего резистора. Предполагая, что последовательное сопротивление передних и задних пьезоэлектрических керамических стеков внутри передающего датчика составляют R1 и R2, соответственно, значения сопротивления R1 и R2 регулируются, чтобы контролировать плоскостность передаваемого преобразователя в полосе. Благодаря анализу конечных элементов моделируется отклик эмиссии передаваемого преобразователя при различных значениях сопротивления. В качестве примера пример приведенного датчика с двойным резонансным преобразователем 18 ~ 45 кГц в качестве примера, анализ моделирования показывает, что передача изменяется в зависимости от кривой значения сопротивления, как показано на рисунке 4 плоскостность в полосе частоты передающего датчика. Оптимизируя сопротивления R1 и R2, можно сделать вывод, что когда R1 = 940Ω, R2 = 330Ω, у него лучше в полосе. (Показано пунктирной линией на рисунке 4), а общий отклик в эмиссии не сильно меняется,

Он может соответствовать требованиям проектирования в сочетании с фактическим физическим размером и широкополосным сопротивлением импеданса, комплексное моделирование может получить 3 ~ 18 кГц, 18 ~ 45 кГц и 45 ~ 100 кГц передатчика передатчика, как показано на рисунке 5-7. Это можно увидеть на рис. 5-7 что отклик напряжения передатчика преобразователя составляет не менее 140 дБ в полосе частот, что соответствует требованиям технических индикаторов, связанных с дизайном, и может обеспечить более крупный уровень источника звука для обнаружения подводного акустического обнаружения на дальние расстояния.


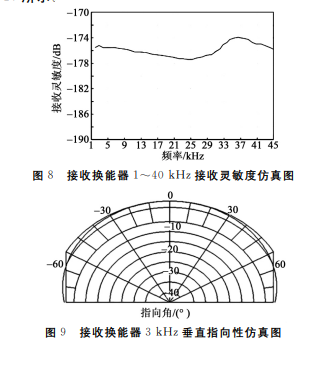
Приемная часть гидроакустического преобразователя реализована путем комбинации двух наборов гидрофона, каждый из которых принимает последовательное и параллельное соединение пьезоэлектрических керамических колец для достижения направленного приема. Среди них гидрофон частотной полосы 1-40 кГц производится в виде двух пьезоэлектрических керамических колец, соединенных последовательно. Чувствительность одного гидрофона не меньше -193 дБ, а чувствительность гидрофона после последовательного соединения не меньше -178 дБ. Результаты анализа имитации чувствительности показаны на рисунке 8. Гидрофон не имеет горизонтальной направленности (может быть применена направленность, регулируемая в перегородке), а вертикальная направленность 3 кГц составляет около 130°Анкет Результаты моделирования показаны на рисунке 9. Вертикальная направленность 40 кГц составляет около 73°и результаты моделирования показаны на рисунке
11. Приемная часть гидрофона в частотной полосе 40 ~ 100 кГц принимает две пьезоэлектрические серии керамических кольца. Рабочая частота может соответствовать использованию 40 ~ 100 кГц, но чувствительность низкая. После последовательного соединения чувствительность гидрофона не меньше -180 дБ. Результаты моделирования чувствительности следующие, как показано на рисунке 11. Уровень гидрофона не имеет направления (для корректировки направления может применяться перегородка), а вертикальная направленность при 100 кГц составляет около 77°Анкет Результаты моделирования показаны на рисунке 12

В соответствии с анализом моделирования, основанным на методе конечных элементов, комбинированный преобразователь, разработанный в этой статье, может соответствовать требованиям к вводу проектирования с точки зрения передачи и получения, а основные технические показатели выполняются.
2.2 Разработка преобразователя
Широкополосная связь вместе взятасферический подводной акустический преобразовательустановлен на небольшом ПЗУ для использования. На основании удовлетворения потребностей широкополосного акустического обнаружения, он фокусируется на небольшом размере и легкомысленном дизайне. В этой статье, в сочетании с общей конструкцией структуры небольшого ПЗУ, окончательный развитый преобразователь показан на рисунке 13. Конструкция конструкции показана на рисунке 14. Широкополосный комбинированный подводной акустический преобразователь, разработанный и разработанный в этой статье, охватывает передачу Частотный диапазон 3 ~ 100 кГц, полоса частот принимающей частоты 1 ~ 100 кГц и общая масса физического объекта составляет 9,4 кг (в воздухе, включая кронштейн и подключаемый кабель), размер 328,5 мм×140 мм×240 мм, что меньше, чем требования к размеру и качеству при входе в дизайн, что уменьшает требования к емкостью ПЗУ. Преобразователь сопоставлен и установлен на корпусе ПЗУ, а фактический объект после установки показан на рисунке 15. Результаты анализа моделирования могут использоваться в качестве справочного ввода дизайна, но в последующем фактическом процессе разработки и отладки его необходимо скорректировать В соответствии с фактической ситуацией измерения для удовлетворения фактических требований к использованию.
3 Экспериментальный тест
Передающая часть широкополосной комбинированной подводной акустической преобразователя принимает 3 вертикальных единица для формирования полосы рабочей частоты, охватывающей 3 ~ 100 кГц, а приемная часть принимает 2 независимых единица для формирования полосы рабочей частоты, покрывающей 1 ~ 100 кГц. Общая планировка передачи на обоих концах и получения в середине принимается для обеспечения угла открытия преобразователя. Антиакустическая перегородка предназначена внутри преобразователя, чтобы уменьшить внутреннее отражение и суперпозицию акустического сигнала. В то же время в приемной части регулируемый механизм опор Тело ROV. После завершения разработки, чтобы дополнительно получить фактическую рабочую производительность преобразователя, который отличается от метода независимого испытания приемопередатчика, обычно используемого в лаборатории, здесь используется общий тест индекса акустического характеристик преобразователя. То есть после того, как целое установлено на ROV, тест бака датчика проводится при моделировании фактических условий труда, чтобы дополнительно подтвердить, что датчик установлен на ROV и влияет на структуру ROV, чтобы получить Фактическое рабочее состояние преобразователя. Реальные параметры производительности. Комплексный тест был проведен в анехозном пуле, чтобы проверить реализацию его показателей производительности. Условия испытаний анехозного бассейна. Амбиентная комнатная температура 25℃, длина испытательного кабеля составляет 3 м, глубина воды составляет 3 м, температура окружающей среды составляет 20℃, сопротивление изоляции составляет 500 мΩСтатическая емкость составляет 51 000 пф, а испытательное расстояние составляет 6,2 м. Фактические результаты измерения показаны на рисунках 16


ROV используется для установки широкополосного комбинированного подводного акустического преобразователя для выполнения широкополосного подводного акустического обнаружения пузырьков следа поверхностного корабля и получить соответствующие акустические характеристики пузырьков следа и физический размер следа. В конкретном испытании озера поверхностный корабль использовался для обеспечения высокоскоростной прямой навигации на поверхности воды. Корабль длился 7,5 м, шириной 3 м и имел черновик 0,35 м. Пропеллер внешнего двигателя был 0,8 м под водой. Тестовая площадь воды представляет собой открытую площадь озера, средняя глубина площади составляет 35 м, а скорость корабля составляет 10 узлов при прохождении точки измерения. ROV оснащен широкополосным комбинированным подводным акустическим преобразователем в этой статье для непрерывного измерения. В повторных измерениях различные комбинации акустических частот используются для обнаружения, и получены результаты измерения распределения пузырьков в следующий раз, как показано на рисунке

Из рисунка 18 видно, что фактическое измерение размер пузырьков корабля концентрируется в высокой плотности 10-20μм Результат измерения согласуется с самой высокой плотностью числа пузырьков в следе, данное литературой с радиусом 10-20μM, который доказывает, что преобразователь. Устройство соответствует требованиям испытаний в фактической рабочей среде. В то же время преобразователь используется для непрерывного измерения слоя пузырьков следа, образованного после плавания поверхностного корабля, и в соответствии с полученной информацией об интенсивности акустической цели пузырьков в сочетании с текущей подводной акустической средой (например, звуковой скоростью, глубина воды. и т. д.) и предыдущие данные (такие как чувствительность преобразователя, усиление схемы на уровне источника источника эмиссии и т. Д.), Оцененные в соответствии с соответствующим алгоритмом обработки, и получили кривую прочности пузырька с глубиной и временем, как показано на рисунке 19. Из рисунка 19 можно увидеть, что продолжительность пузырьков следа составляет около 173 с, а фактическая измеренная толщина пузырьков среднего пробуждения составляет 1,46 м, что в основном согласуется с эмпирической формулой, заданной обычной формулой расчета следа. Таким образом, благодаря общему тесту измерения в анехозном пуле результаты измерения показывают, что фактическая производительность преобразователя в основном согласуется с результатами моделирования. Он установлен на платформе ROV и проверен фактическим навигационным тестом на озере. Результаты испытаний показывают, что преобразователь охватывает широкую частотную полосу, имеет небольшую структуру, и результаты измерения в основном согласуются с эмпирическими формулами. Данные о измерении заслуживают доверия и могут соответствовать требованиям пузырьков поверхностного корабля.
4. Вывод
В этой статье предлагается комбинированный метод интегрированного конструкции преобразователя с низкочастотной или высокочастотной широкополосной рабочей полосой, которая характеризуется тем, что передача может покрывать 3 ~ 100 кГц, полученный конец 1 ~ 100 кГц и угол открытия. не менее 70°; Принятие отдельной схемы приемопередатчика, передаваемой на обоих концах, получая концентрированные в центре, внутренняя акустическая конструкция структуры перегородки; Внутренние компоненты преобразователя интегрируются и выводят через водонепроницаемый разъем, уменьшая сложность внешних соединений; Через центральную опорную структуру преобразователя может быть скорректирован общий центр тяжести преобразователя, что удобно для адаптации и установки небольших подводных транспортных средств, таких как ROV; Открытая компоновка преобразователя, механическая нагрузка через опору металла, уменьшает весь преобразователь качество и размер устройства улучшают соответствие. Этот преобразователь имеет преимущества широкой полосы рабочей частоты, больший угол открытия и более легкий вес под ограничением небольшого размера. Он был успешно применен к небольшому ПЗУ, который решает проблему сверхуровневого подводного акустического испытания на небольшой платформе ПЗУ. Имеет высокую военную и гражданскую ценность.





 Tech Co,.Ltd")